Black Box System Controller
Top-of-class controller design for unknown transfer function system using advanced control theory.
About This Project
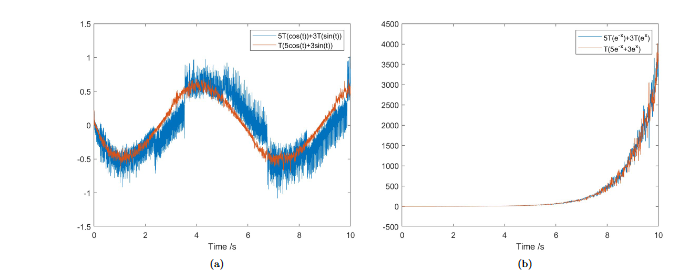
As part of a design course, we were given a black box system with an unknown transfer function that took input functions to unpredictable output functions. The only information available was samples of the output function at regular intervals. The task was to test the system and design a controller to ensure that the output of the system matched the input function exactly. Key tasks to do this included: i) proving time invariance of the system ii) estimating noise and filtering it out (used Fourier Analysis to justify low-pass filter) iii) creating a Bode plot based on an efficient algorithm to test different frequencies iv) estimating a corresponding transfer function and implementing feed-forward compensation to ensure the system was minimum phase v) designing and testing a PID controller. The controller exceeded all target specifications and was deemed top of the class.